Has this ever happened to you? You’re driving your car and pull up to a stoplight, and another car pulls up beside you absolutely blasting the bass from their sound system. That’s got to be an aftermarket subwoofer, you think to yourself. Even though the sound is muffled and you can’t hear a melody, the bass is coming through loud and clear. You feel the steering wheel vibrating in your hands. It can be an unpleasant sensation. Other things in your car may vibrate as well. You may have an unpleasant sensation in your ears and feel the beat viscerally in your chest or stomach.
This is a result of resonance, a physical phenomenon that is very important for humans. Resonance is common to many different kinds of oscillating systems, though most people are most familiar with the idea of acoustic resonance which involves what we would call sound waves. My goal here is to develop a more comprehensive, wider-context understanding of resonance wherein acoustic resonance is a notable example.
Mathematical waves
Oscillation (how I’m using it here) refers to an object moving back and forth in some way. Things that oscillate relatively slowly are a bit easier to understand as far as real-world examples. The bouncing of a ball and the swinging of a pendulum are both examples of oscillation. This kind of oscillation, which is commonly encountered in nature, is called harmonic motion. It goes like this:
Some outside force pushes an object to get it started. As the object moves, a force in the opposite direction, a restoring force, appears. The restoring force starts out small and gets larger and larger as the object continues moving, until the object eventually stops and reverses direction. After that, the restoring force gradually shrinks back to zero, and then a restoring force in the opposite direction appears. This pushing back and forth would continue indefinitely if not for damping forces such as friction.
Let’s use a mass attached to a spring as an example of simple harmonic motion. The system will be arranged horizontally on a tabletop with the spring attached to a wall. The table is our frame of reference. We will make several simplifying assumptions, including that the spring is massless, that the mass is a solid incompressible block, and that friction with the table and air are negligible.
We can start by considering the situation when it is in equilibrium. At this point, the spring has not been stretched or compressed at all and the block is resting stationary at its initial position. The only forces acting on the block are the force of gravity pulling it downwards against the table and the normal force from the table holding it up. Since the normal force is a reactive force (equal and opposite), it balances the force of gravity exactly. This means the net force on the block is zero and so it does not accelerate.
Now, imagine we pull the block away from the wall, stretching the spring. The force exerted by the spring on the block is proportional to the distance the block has been moved from its initial position. This can be expressed by Hooke’s law:
Fspring = –kx
where x is the displacement from the initial position and k is the “spring constant” which represents how stiff the spring is. The real-world value of k depends on things like the size of the spring and what material it is made of, but we will ignore those details for this example.
As long as we are holding the block in place, we are providing a force to balance Fspring and thus preventing the block from accelerating. When we let go, the force of the spring accelerates the block back towards its initial position, but the block overshoots its initial position due to the velocity it has gained. As it travels past its initial position, it begins compressing the spring, resulting in another spring force (this time in the opposite direction). The block then slows, stops, and reverses direction, accelerating back towards its initial position again. It again overshoots it and stretches the spring until it stops and reverses direction. This process will continue repeating, in our case (with no damping) forever unless an outside force acts on the system to interrupt it.
Note that the block moves back and forth at regular time intervals. This kind of behavior is called periodic. The time it takes to complete one “cycle” of the block moving from one extreme to the other and back is called the period. The rate at which the spring-mass system oscillates is called its frequency. The period and frequency are inverses of each other, with period measured in seconds (per cycle) and frequency measured in number (of cycles) per second. The unit for frequency is a Hertz (Hz) and is equivalent to 1/s (where s is seconds).
Suppose we look at this spring-mass system from above. We’ll simplify things visually by just representing the position of the block as a point on the vertical axis. As the point moves, we can imagine it tracing its movement back and forth over time (as if the position is making a mark on a roll of paper that is being slid across the table beneath the block at a constant speed).
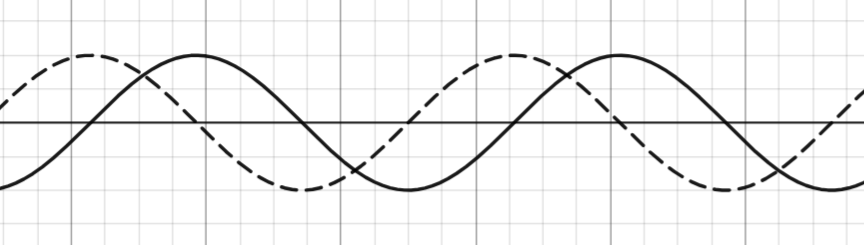
We can observe that the shape it traces out looks like waves. In particular, it is sinusoidal, meaning it resembles a sine function (or “sine wave”). Also, if we take the same concept but graph the kinetic energy and elastic potential energy of the system instead of the block’s position, we get similar looking curves:
Note that the total energy (the sum of the two curves) is constant because energy is being conserved. The two waves are offset by half the length of a cycle. This is a difference in phase, and here we would say the waves are out of phase with each other. We can see why this happens when considering the physics: the potential and kinetic energy depend on the distance of the block from equilibrium. When the block is stopping to change direction at either extreme, the potential energy is at its maximum and the kinetic energy is zero. When the block is located at the equilibrium point, the potential energy is zero, but this is precisely when the block’s velocity (and thus kinetic energy) is maximized. There are two points, each of which is halfway between the equilibrium position and one of the extreme positions, where potential and kinetic energies are equal. From the perspective of just looking at how the block’s position changes over time, these two points don’t appear to be particularly special. When looking at the two energy waves, these are the points where they intersect.
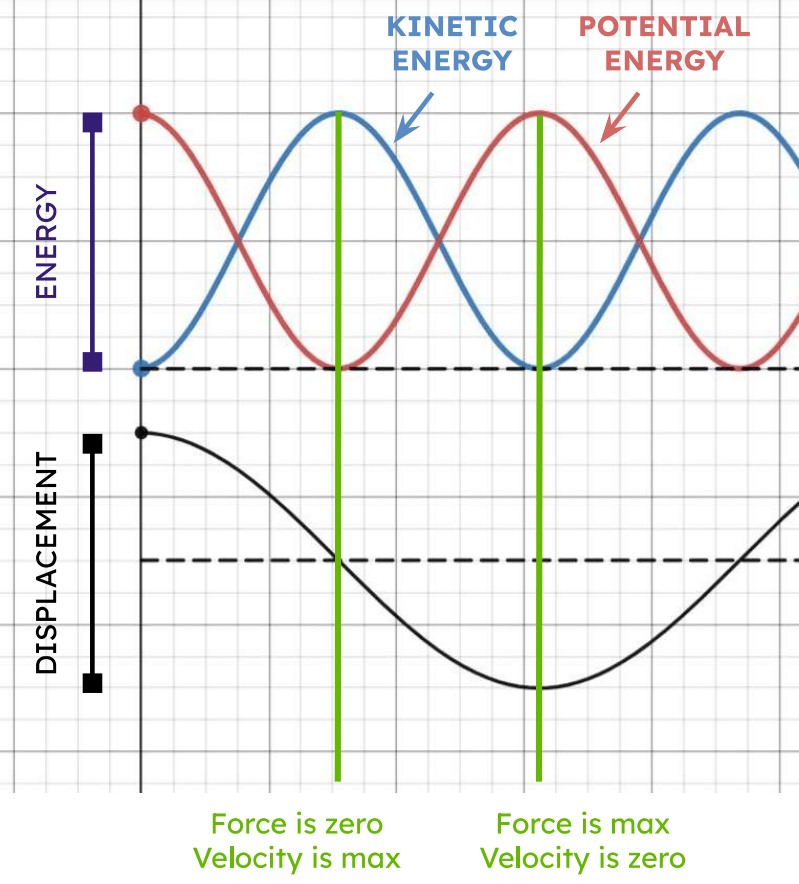
Notice that the frequency of the energy waves is double that of the actual oscillation. Intuitively, this is because the energies “don’t care” whether the block is to the right of the equilibrium point or to the left of it, so one complete cycle for the energies happens in just half a cycle for the displacement. In order to understand this mathematically, let’s take a step back for a moment.
Kinetic energy is given by the formula KE = ½mv2 where m is the mass and v is the velocity. Since the mass of the block doesn’t change over time (it is constant), we’re going to focus on the velocity. The elastic potential energy of a spring is given by PE = ½kx2 where k is the spring constant and x is the displacement from equilibrium (or position of the block). Again, since k is constant we’ll focus on how x changes over time. Both x and v are functions of time (t). To make things simple, let’s just assume we can describe the position as the function:
x(t) = sin(t)
Notably, velocity is the rate of change of position, in other words the velocity function is the derivative of the position function. Surprise, it’s calculus! We have:
v(t) = x’(t)
The derivative of sine is cosine, so we get:
v(t) = cos(t)
Recall that the sine and cosine curves have the same shape, but are out of phase by a quarter of one period.
But remember PE and KE involve x2 and v2. Without going into too much detail, let’s just observe what sine and sine squared look like:

First, the frequency has doubled. We also see that sine squared “doesn’t care” whether sine is positive or negative. Intuitively, this is because squaring any real number makes it positive. The amplitude has also been halved, but this aspect isn’t important for the current discussion since the actual amplitudes will depend on the constants k and m.
Finally, let’s compare sine squared and cosine squared:
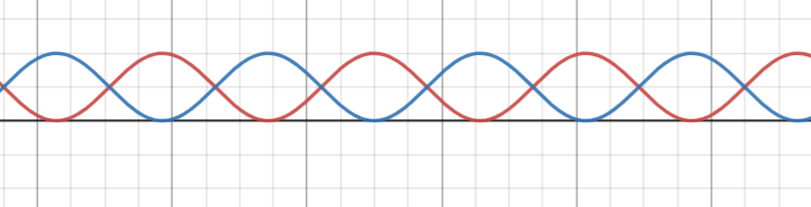
That looks like our energy curves! Indeed, substituting our expressions for x(t) and v(t) for x and v in our energy formulas gives us:
PE = ½k * sin2(t)
KE = ½m * cos2(t)
Putting it all together, we can compare the graphs:
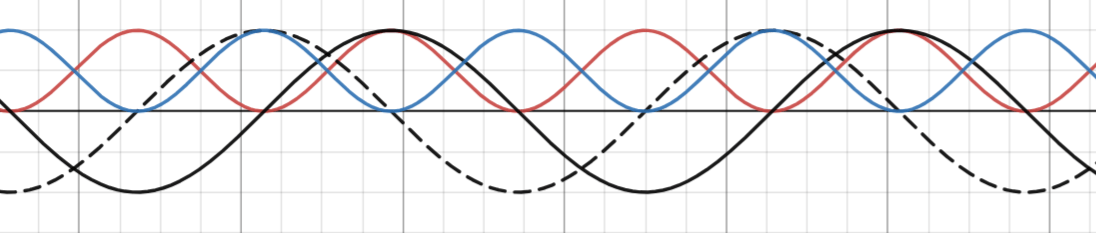
Note that it is most common to use cosine for position, not sine, but in our particular situation it doesn’t make a difference and it just simplifies the math slightly. In other words, I don’t recommend using the formulas above for general purposes, they are only referring to my example here.
Circles and triangles
There is something very convenient about periodic behavior, which is that any kind of periodic behavior can be represented as moving in a circle (where making a full circle is one period or cycle). Additionally, Any position along a circle can be represented by an angle it makes with the center of the circle and some predefined starting point.
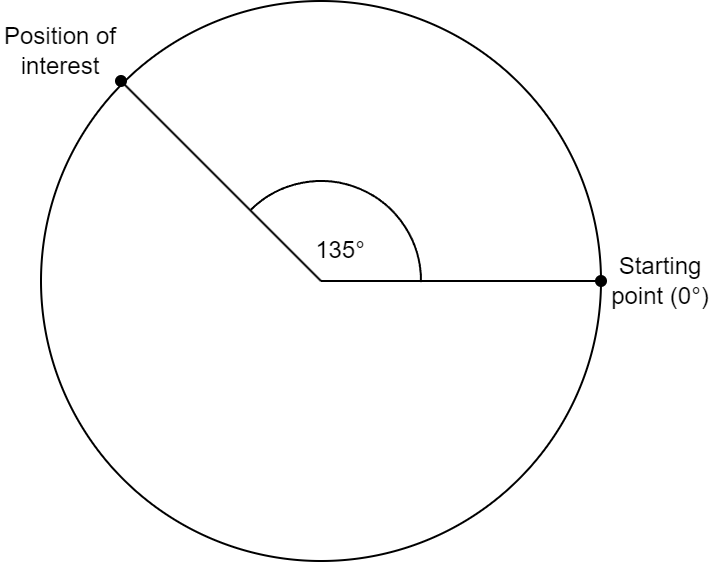
This is where the unit circle comes in.
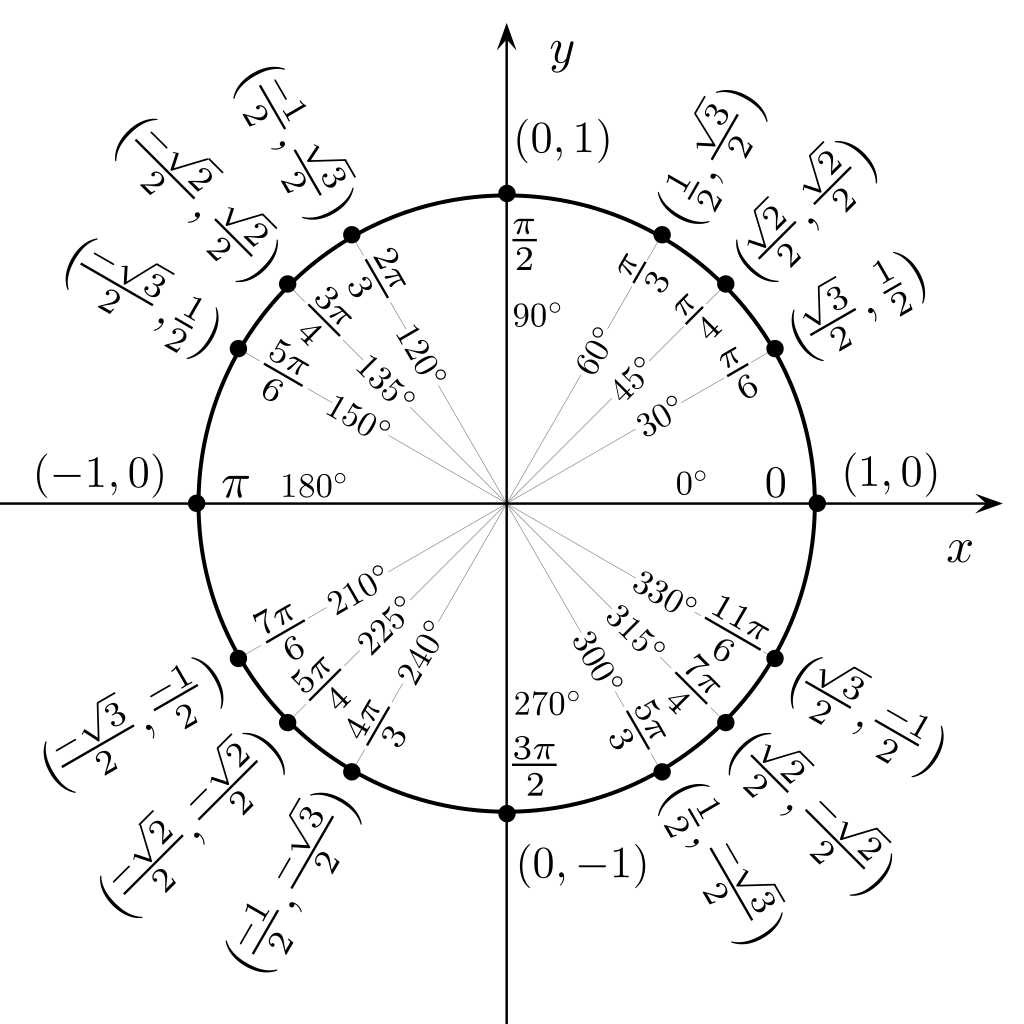
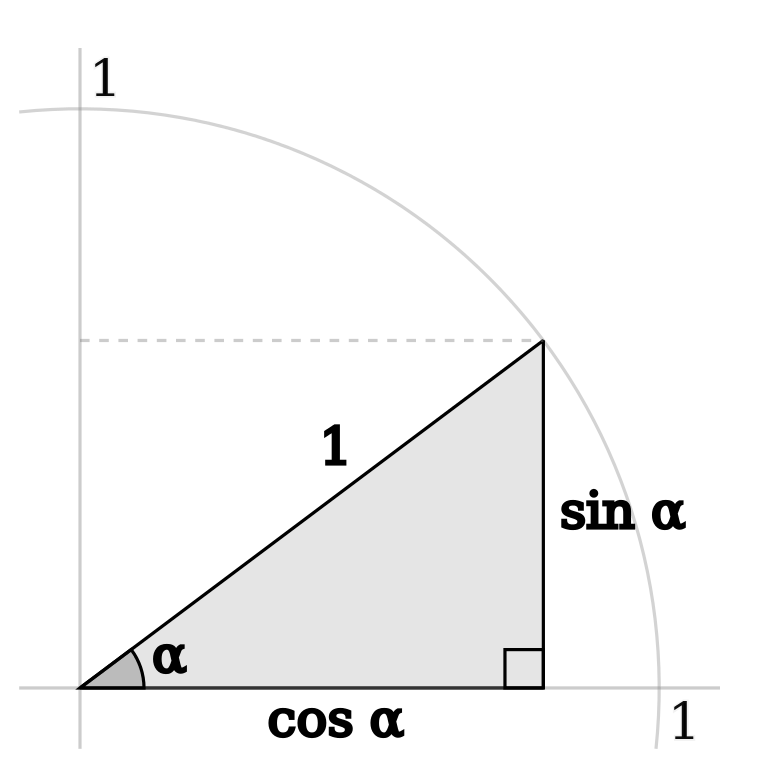
I will not explain the unit circle in detail here, but the general idea is that we can draw a right triangle for any point on the circle where the two legs of the triangle are the x and y coordinates of the point. This allows us to use the trigonometric ratios of right triangles (sine is the ratio of the opposite side to the hypotenuse, and so on). The sine function, then, is the y-value of a point on a circle as a function of the central angle it makes.
This is why, when we talk about oscillation of any kind, math involving angles and trigonometry appears. What I just called frequency when describing the spring-mass system is more properly called angular frequency, referring not to any physical angles in the system but rather to the phase angle. This is the mathematical abstraction of “how far along its cycle” something is.
Note that when it comes to oscillation, generally speaking, only simple harmonic motion corresponds to a point moving in a circle at a constant speed. Damped harmonic motion, for example, will look like a point “spiraling down” to zero. More complex physical situations require more complicated mathematical descriptions. Nevertheless, we can always use this “circular motion” principle to describe such systems.
Natural frequency
Going back to the spring-mass system (an example of simple harmonic motion), notice that its angular frequency (how fast it oscillates) does not depend on how far we initially stretched the spring. This was our one and only interaction with the system, meaning that we don’t control the frequency but rather the system itself has a natural frequency. It turns out this natural frequency depends on the mass of the block m and the spring constant k. Specifically, the angular frequency is given by the equation:
ω = √(k/m)
Where ω (small Greek letter omega) is angular frequency.
Even in more complex situations, we see that there are natural frequencies. For example, consider sound echoes. If we stand in a large empty arena and clap loudly, the amount of time it takes for us to hear an echo is a property of the system: in this case, it depends on the distance to a wall or other surface that reflects sound and on the speed of sound in air at that particular temperature, pressure, etc. Or, if we think of tossing a stone into a still pond of water to make ripples, the distance between each individual ripple is a property of the system. Such frequencies depend on intermolecular forces and so on.
In all of the examples we’ve considered so far, we just interacted with the system once to get it started oscillating. However, in many real-world situations there is an outside force continually adding energy to the system. We would say that the oscillation in such situations is being driven. A periodic external force acting on the system can itself be represented as a wave.
Superposition and standing waves
When multiple waves interact, these two concepts are important to keep in mind. First, the principle of superposition states that how waves interact is by adding their amplitudes. This is one factor that can create “bumpy” waves or waves that don’t look purely sinusoidal.
Waves that move through space, including sound waves and water waves, can create even more complicated dynamical situations as waves move through one another in different directions. However, there are special circumstances in which we get a standing wave which appears to oscillate without moving.
The points on a standing wave that do not move (where the wave intersects the x-axis in the animation above) are called nodes. Halfway between each pair of nodes, where the movement is greatest, is an antinode. The distance between two nodes is ½λ, where λ (small Greek letter lambda) is the wavelength (period) of the standing wave.
Importantly, standing waves are formed by waves moving in opposite directions with their frequencies, velocities, phases, etc. matched up in a specific way. This situation often arises when a wave is being reflected back on itself, such as a string under tension vibrating with one or both ends of the string affixed to a stationary point.
Harmonics and resonant frequencies
Let’s think back to the spring-mass system. If we were to drive that oscillation, like by periodically hitting the block leftward with a hammer, we would be superimposing those two “waves.” If we hit the block at random intervals, then it will occasionally cause the block to speed up (constructive interference) and occasionally cause the block to slow down (destructive interference). This would create wobbly, irregular motion. On the other hand, if we hit the block leftward precisely each time it stops moving to the right and changes direction (in time with the system’s natural frequency) then we would have the waves perfectly in phase, creating all and only constructive interference. In other words, we would only be increasing the amplitude of oscillation. This effect is called resonance, and the natural frequency of the system is called its resonant frequency.
One use of this principle is to counter the damping effects of things like friction without otherwise changing the behavior of the oscillation. This is why, for example, pendulum clocks use driven oscillation (since otherwise the pendulum would fairly quickly slow to a stop). The timing of the pendulum swing is maintained by driving the pendulum at its natural frequency (i.e. its resonant frequency).
A similar example is swinging on a swingset and pumping your legs to go higher. In order for it to work, you have to pump your legs in time with the natural rate of swinging. It is only possible to increase your swinging amplitude; there is no way for a person on a swing to consistently and appreciably increase the rate at which they swing back and forth.
Now, the examples we’ve talked about so far have been useful to illustrate specific concepts, but what we are really here to talk about is vibration waves. First, let’s consider the vibration of a guitar string. We’ll assume the string is fixed on both ends just like on an actual guitar, and for now we will assume we are plucking the string directly in the center. When we pluck the string, we are adding energy to the system similar to how we stretched and released the spring in the spring-mass system. Since the guitar string is under tension, its elastic forces want to pull it back into equilibrium position; but like the spring, it will overshoot its equilibrium position and move back and forth until it has lost all the energy we gave it. Much of this energy is transferred to the surrounding air as sound.
The wave we create by plucking the string is called a transverse displacement wave, meaning it is moving (displacing) the medium in which is traveling and this motion is perpendicular (transverse) to the string itself. This wave travels outwards from the center (where the string was plucked) and is reflected back at each end by the fixed point. The velocity of this wave depends on the material properties of the string. After the waves are reflected, each travels back in the direction of the opposite side. Recall that when two waves with the same frequency are moving through each other in the right way, a standing wave is formed. In this case, the two fixed endpoints are forced to be nodes. The most basic standing wave that can form, then, is a single antinode between these two nodes. This is called the fundamental or first harmonic of the string and comes from the string’s natural frequency.
Note that the length of the string, L, is very important. For the first harmonic, L must be half the wavelength corresponding to the natural frequency. Recall that wavelength and frequency are inversely proportional. They are related by the equation:
λ = v / f
where λ is wavelength, v is velocity of the wave, and f is the frequency. For a given string, the velocity remains constant under normal conditions. The reason L is half of λ is because a full wavelength would be three nodes and two antinodes, rather than what we see above.
However, what we find is that any whole number multiple of ½λ produces a standing wave with that number of antinodes. These are the other harmonics of the string. For example, the second harmonic has L=λ, the third harmonic has L=1.5λ, and so on.
This means that, if we hold L and v constant (such as when considering one particular string on a guitar), then the additional harmonics beyond the fundamental must be changing λ and thus changing f. Specifically, the first harmonic has nodes on both ends. If we divide the wavelength in half by adding a node in the middle, we get the second harmonic and the frequency doubles. If we instead divided the wavelength into thirds, we get the third harmonic and the frequency triples. Dividing the wavelength into fourths gives us the fourth harmonic and quadruple the frequency, and so on.
For example, if the frequency of the first harmonic of a guitar string is 82 Hz (i.e. 82 full vibration cycles per second), then the second harmonic would be 164 Hz, the third harmonic would be 246 Hz, and so on. These are the same frequencies of pressure waves in the air (sound) that is produced when the string’s oscillation energy is dispersed into the environment.
Likewise, vibrations in the air will push and pull on objects like guitar strings, causing them to vibrate as well. This is a form of driven oscillation: the oscillation of the string is being driven by the oscillations of air molecules. If the sound/air vibration is in the frequency of one of the string’s harmonic frequencies, then it will resonate, just like driving a pendulum or a spring-mass system at its natural (resonant) frequency.
The key idea, which we have finally come to, is that harmonic frequencies are resonant frequencies and are integer multiples of a system’s natural frequency (or fundamental harmonic frequency). Recall that the natural frequency is dependent on the physical properties of the system. For a simple spring-mass system, as we saw, the natural frequency depends on the mass of the block and the stiffness of the spring. For a simple pendulum, the natural frequency depends on how strong gravity is and how long the pendulum is. For a guitar string, the natural frequency depends primarily on the length of the string and how much tension it is under. Tension is adjusted before playing by tuning. The length is modulated during playing by pressing the string against the frets. The careful spacing of the frets is what enables a single string to produce multiple notes of different pitch (sound frequency). Notably, actual guitar strings produce multiple harmonics when plucked, producing a “richer” sound than a single frequency would.

More complex resonant oscillation
We have so far been focusing on oscillation in a single dimension. In reality, oscillation can involve several different directions and modes, including compression (pressure waves) and torsion (twisting). Additionally, there are more different ways for a two-dimensional surface (like a drum head) to oscillate compared to a string.
This means that the location where the drum head is struck matters. On a djembe drum for example, striking the drum directly in the center produces a low-frequency “bass” sound, striking the drum between the center and the edge produces a medium-frequency “tone” sound, and striking the drum very close to the edge produces a high-frequency “slap” sound. This effect is illustrated in the animations above.
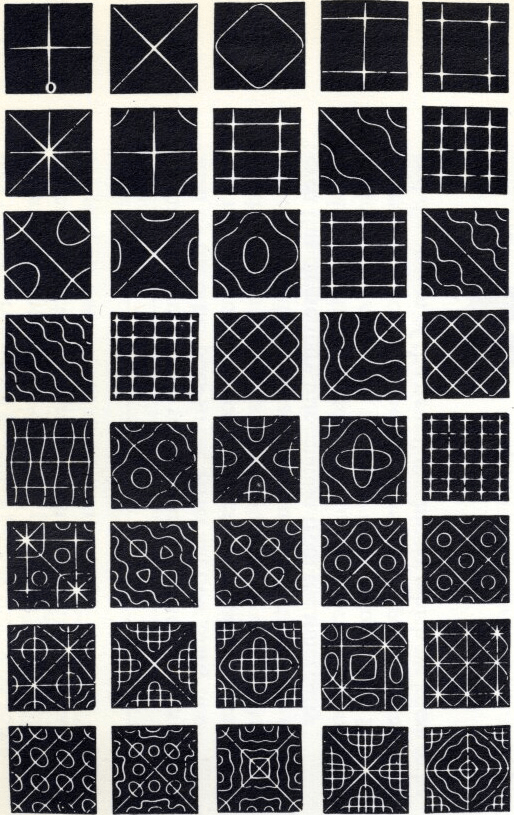
Just as different oscillation modes on a drum can create different sound frequencies, driving the oscillation of a 2D surface at certain frequencies creates different oscillation modes. By covering a square metal plate with sand then driving the oscillation of the plate at one of its resonant frequencies, the sand is forced into the antinode (stationary) areas, forming patterns that show the oscillation mode. These patterns are called Chladni figures.
Undesirable resonance
We have seen that the most effective way to transfer energy from an oscillating system to another system (that is capable of oscillating) is by oscillating at the latter system’s resonant frequency. This physical phenomenon has some unfortunate effects.
Wheels
If you’ve ever driven a car suffering from imbalanced wheels, you’ll know that driving close to a specific speed causes the entire car to vibrate and rattle. When a wheel is imbalanced, meaning the center of mass is not at the center of rotation, it results in an oscillating centripetal force. There are two ways a wheel can be imbalanced, static (which causes the wheel to “shake up and down”) and dynamic (which causes the wheel to “wobble from side to side”).
The speed of rotation of the wheel depends on the speed on the car and the diameter of the wheel. At a certain speed, the oscillation of the wheel will match the resonant frequency of parts of the car it is attached to, causing intense vibration.
Imbalanced wheels can cause damage to a vehicle over time, often through irregular stress and wear of critical parts and sometimes because of the vibration itself. It can also cause severe discomfort for the driver and passengers.
Many inexperienced drivers, even when faced with such discomfort, still doubt whether it is necessary to balance the wheels. But the consequences can be even more serious, up to the breakdown of the chassis of the car. For example, driving on wheels with a diameter of 14 inches with an imbalance of only 20 g at a speed of 90 km / h is comparable to an impact to the suspension with a sledgehammer weighing 3 kg.
Rosava
Earthquakes
In an earthquake, the ground vibrates in multiple ways and at multiple frequencies. These different waveforms travel at different speeds, and arrive one after another depending on the distance from the epicenter.
When a fault ruptures, seismic waves are propagated in all directions, causing the ground to vibrate at frequencies ranging from about 0.1 to 30 Hertz. Buildings vibrate as a consequence of the ground shaking; damage takes place if the building cannot withstand these vibrations. Compressional waves and shear waves mainly cause high-frequency (greater than 1 Hertz) vibrations which are more efficient than low-frequency waves in causing low buildings to vibrate. Rayleigh and Love waves mainly cause low-frequency vibrations which are more efficient than high-frequency waves in causing tall buildings to vibrate.
USGS
There are many ways in which architects and engineers can reduce damage from earthquakes. These include building stronger and more flexible structures that will not collapse under vibration, retrofit structural reinforcement, base isolation, and tuned mass dampers. Base isolation is a technique which allows the ground to shake around the building without transferring much of that vibration to the building itself. Tuned mass dampers involve canceling out vibration at the building’s resonant frequency.


These techniques are also used to reduce vibration of tall buildings resulting from strong winds, which is a major concern for skyscrapers.
Tsunamis are more difficult to protect against. While some areas of coastline have walls or buildings constructed on stilts, tsunami safety is generally focused on early warning systems and clearly marked, accessible escape routes. Walls and stilts are most effective against relatively minor storm surges or small tsunamis. For a person who lives near a coastline, there is nothing they reasonably do to protect their house from being destroyed by a large tsunami, but they may be able to save themselves and their family by evacuating to higher ground as quickly as possible.
Other vibration effects
A phenomenon many engineers must take into consideration is that vibration of a nut-and-bolt fastener can cause the nut to become loosened, and eventually it may fall off entirely. This largely a concern for systems that are subjected to prolonged, intense, high-frequency vibration, including cars and airplanes.
In general, vibration is a source of wear on mechanical systems. Additionally, prolonged exposure to vibration can be damaging to the human body, causing “vibration disease” or hand-arm vibration syndrome:
Use of vibrating tools at work often leads to development of the hand-arm vibration syndrome (HAVS). It manifests with vascular symptoms (occupational Raynaud’s disease), neurologic (carpal tunnel syndrome – CTS) and musculoskeletal symptoms (impaired grip strength, osteoarthritis, bone necrosis).
The HAVS has been reported in forestry and quarry workers, builders, carpenters, mechanics, dentists, and physiotherapists using ultrasonic therapy devices. Grinders, hammers, wrenches and saws pose the highest risk for developing HAVS in users.
Nieradko-Iwanicka 2019
Sound
Loud noises also cause undesirable vibration. Thunder or sonic booms can rattle windows, dishes in cabinets, and so on, occasionally resulting in things breaking. And of course, powerful subwoofers can cause intense, visceral body sensations. With respect to hearing, it is resonance that enables us to hear at all, but the human inner ear is also delicate. Loud music, for example, drives oscillation of inner ear components with great force, which over time causes physical damage to these components. This damage often results in tinnitus and partial loss of hearing, known as noise-induced hearing loss (NIHL).
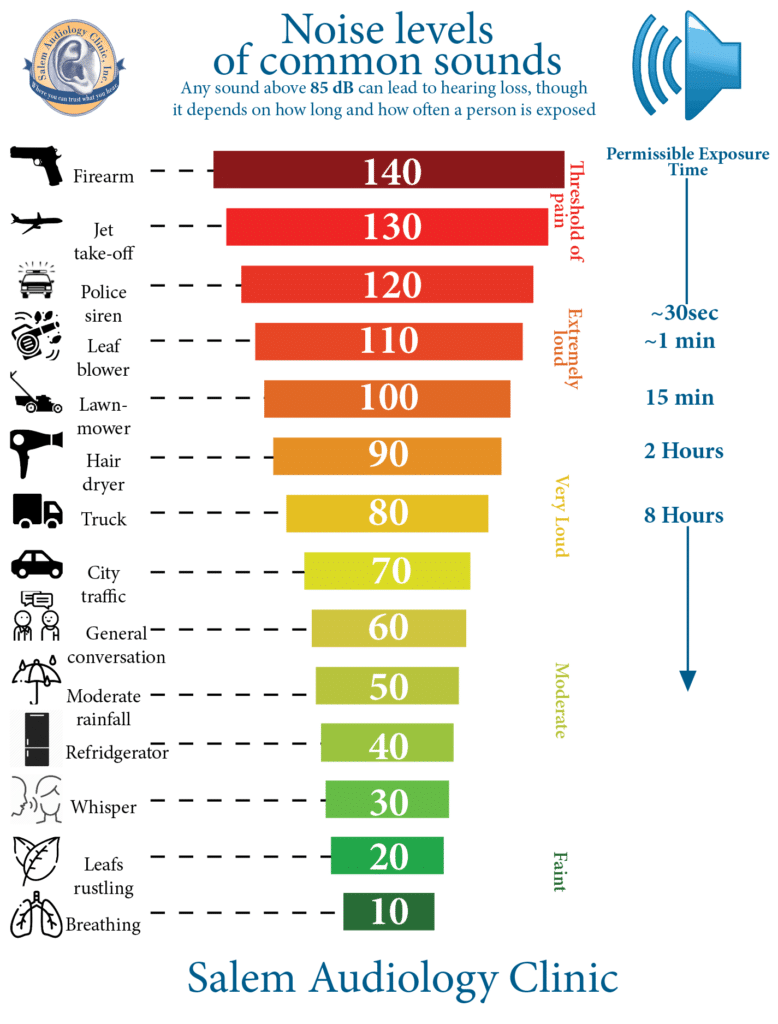
Earbuds and headphones often have a maximum volume exceeding 100 dB, although some software limits sound output to a safe level. Using headphones at maximum volume for an extended period of time will cause permanent damage to anyone, regardless of age or health.
…And beyond
There are many more ways things can “oscillate” aside from the physical motion discussed here. This includes electromagnetic waves (visible light, radio waves, x-rays, and so on), voltage waves in AC circuits, quantum probability waves (“wave functions”) and gravity waves. Each topic represents a deep field of study in itself.